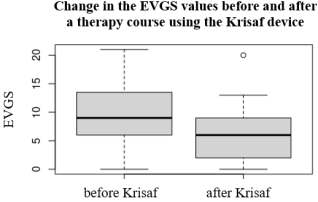
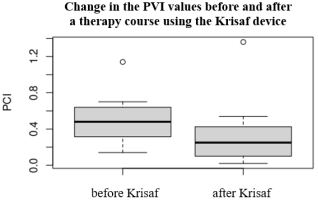
Cerebral palsy (CP) is a group of non-progressive diseases that occur during pregnancy, intranatal, and postnatal periods and are manifested by varying degrees of nervous system disorders. The frequency of CP incidence, according to various authors, ranges from 1.4 to 4 per 1000 normal births. Patients with CP require constant, long-term treatment and rehabilitation. Patients and methods: This study was conducted to determine the efficiency of a new method of locomotor therapy using the reduced gravity Krisaf device. The study group included 11 children of GMFCS I-III, the average age was 10.81 ± 3.54 years (6-16 years), (4 males, 7 females). The average number of procedures per course was 8.71 ± 1.25 (7-10). The average duration of the procedure was 36.11 ± 6.97 (20-40) minutes. The assessment was conducted before and after the course of therapy using the Krisaf device. Spasticity was assessed using the Modified Tardieu Scale (MTS). The Edinburgh Visual Gait Score (EVGS) was used to assess gait. The Physiological Cost Index (PCI) and the ability to maintain balance on one leg (One-leg standing balance test (OLST)) were also assessed. Results: Krisaf therapy is efficient while treating motor function and affects gait according to the EVGS (p = 0.02154, p < 0.05) and changes in energy efficiency according to PCI (p = 0.0293, p < 0.05) and has not significantly affected spasticity measured by the MTS in this study. On the right p = 0.5896, on the left p = 0.1056. The results of maintaining balance according to the OLST were ambiguous. On the right leg, the time changed reliably (p = 0.01403), and on the left leg, the time changed insignificantly (p = 0.4098). Conclusion: The obtained results showed the influence of therapy using the Krisaf device on changing the gait and energy efficiency of movement.
| Published in | European Journal of Clinical and Biomedical Sciences (Volume 11, Issue 3) |
| DOI | 10.11648/j.ejcbs.20251103.12 |
| Page(s) | 43-47 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Krisaf, Cerebral palsy, Edinburgh Visual Gait Score
Parameters | Values |
|---|---|
Age (± SD) | 10.81 ± 3.54 years |
Gender | male - 4 (36%), female - 7 (64%) |
GMFCS I | 4 (36%) |
GMFCS II | 4 (36%) |
GMFCS III | 3 (28%) |
CP | Cerebral Palsy |
EVGS | Edinburgh Visual Gait Score |
GMFCS | Gross Motor Function Classification System |
MTS | Modified Tardieu Scale |
OLST | One-Leg Standing Balance Test |
PCI | Physiological Cost Index |
| [1] | Arneson, C. L., Durkin, M. S., Benedict, R. E., Kirby, R. S., Yeargin-Allsopp, M., Van Naarden Braun, K., and Doernberg, N. S. Prevalence of Cerebral Palsy: Autism and Developmental Disabilities Monitoring Network, Three Sites, United States, 2004. Disabil Health J. 2009, 2(1), 45-48. |
| [2] | Bhasin, T. K., Brocksen, S., Avchen, R. N., and Van Naarden Braun, K. Prevalence of Four Developmental Disabilities Among Children Aged 8 Years - Metropolitan Atlanta Developmental Disabilities Surveillance S. Agarwal Program, 1996 and 2000. MMWR Surveill Summ. 2006, 55(1), 1-9. |
| [3] | Morris, C., Bartlett, D. Gross Motor Function Classification System: Impact and Utility. Dev Med Child Neurol. 2004, 46, 60-65. |
| [4] | Shmuelof, L., Huang, V. S., Haith, A. M., Delnicki, R. J., Mazzoni, P., and Krakauer, J. W. Overcoming Motor “Forgetting” Through Reinforcement of Learned Actions. J Neurosci. 2012, 32(42), 14617-14621. |
| [5] | Cortés-Pérez, I., González-González, N., Peinado-Rubia, A. B., Nieto-Escamez, F. A., Obrero-Gaitán, E., and García-López, H. Efficacy of Robot-Assisted Gait Therapy Compared to Conventional Therapy or Treadmill Training in Children with Cerebral Palsy: A Systematic Review with Meta-Analysis. Sensors (Basel). 2022, 22(24), 9910. |
| [6] | Žarković, D., Šorfová, M., Tufano, J. J., Kutílek, P., Vítečková, S., Ravnik, D., Groleger-Sršen, K., Cikajlo, I., and Otáhal, J. Gait Changes Following Robot-Assisted Gait Training in Children with Cerebral Palsy. Physiol Res. 2021, 70(S3), S397-S408. |
| [7] | Kim, S. K., Park, D., Yoo, B., Shim, D., Choi, J. O., Choi, T. Y., Park, E. S. Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy. Sensors (Basel). 2021, 21(6), 2087. |
| [8] | Jansen, M., de Groot, I. J., van Alfen, N., and Geurts, A. C. Physical Training in Boys with Duchenne Muscular Dystrophy: the Protocol of the No Use Is Disuse Study. BMC Pediatr. 2010, 10(1), 55. |
| [9] | Michmizos, K. P., Rossi, S., Castelli, E., Cappa, P., and Krebs, H. I. Robot-Aided Neurorehabilitation: a Pediatric Robot Forankle Rehabilitation. IEEE Trans Neural Syst Rehabil Eng. 2015, 23(6), 1056-1067. |
| [10] | Roy, A., Krebs, H. I., Williams, D. J., Bever, C. T., Forrester, L. W., Macko, R. M., and Hogan, N. Robot-Aided Neurorehabilitation: a Novel Robot for Ankle Rehabilitation. IEEE Trans Robot. 2009, 25(3), 569-582. |
| [11] | Daminov, V. D., Tkachenko, P. V., Nizametdinova, A. A. Application of the Mechanotherapy Devices Simulating Step-Like Movements in Combination with Electrical Stimulation in Spinal Cord Injury Patients. Bulletin of Rehabititation Medicine. 2020, 5(99), 53-61. |
| [12] | Gorter, H., Holty, L., Rameckers, E. E., Elvers, H. J., and Oostendorp, R. A. Changes in Endurance and Walking Ability through Functional Physical Training in Children with Cerebral Palsy. Pediatr Phys Ther. 2009, 21(1), 31-37. |
| [13] | Orozco, M. D. P. D., Abousamra, O., Church, Ch., Lennon, N., Henley, J., Rogers, K. J., Sees, J. P., Connor, J., Miller, F. Reliability and Validity of Edinburgh Visual Gait Score as an Evaluation Tool for Children with Cerebral Palsy. Gait Posture. 2016, 49, 14-18. |
| [14] | Haugh, A. B., Pandyan, A. D., Johnson, G. R. A Systematic Review of the Tardieu Scale for the Measurement of Spasticity. Disabil Rehabil. 2006, 15, 28(15), 899-907. |
| [15] | Ijzerman, M. J., Nene, A. V. Feasibility of the Physiological Cost Index as an Outcome Measure for the Assessment of Energy Expenditure During Walking. Arch Phys Med Rehabil. 2002, 83(12), 1777-1782. |
| [16] | Serra-Prat, M., Palomera, E. Muscle Strength, Sarcopenia and Frailty Associations with Balance and Gait Parameters: a Cross-Sectional Study. Eur J Geriatr Gerontol. 2019, 1(2), 61-66. |
| [17] | Sehgal, N., McGuire, J. R. Beyond Ashworth. Electrophysiologic Quantification of Spasticity. Phys Med Rehabil Clin N Am. 1998, 9(4), 949-979. |
| [18] | Guo, X., Wallace, R., Tan, Y., Oetomo, D., Klaic, M., and Crocher, V. Technology-Assisted Assessment of Spasticity: a Systematic Review. J Neuroeng Rehabil. 2022, 9, 19(1), 138. |
APA Style
Anatolyevna, Z. V. (2025). Efficiency of Locomotor Therapy Using the Reduced Gravity Krisaf Device in Children with Cerebral Palsy. European Journal of Clinical and Biomedical Sciences, 11(3), 43-47. https://doi.org/10.11648/j.ejcbs.20251103.12
ACS Style
Anatolyevna, Z. V. Efficiency of Locomotor Therapy Using the Reduced Gravity Krisaf Device in Children with Cerebral Palsy. Eur. J. Clin. Biomed. Sci. 2025, 11(3), 43-47. doi: 10.11648/j.ejcbs.20251103.12
@article{10.11648/j.ejcbs.20251103.12,
author = {Zmanovskaya Vera Anatolyevna},
title = {Efficiency of Locomotor Therapy Using the Reduced Gravity Krisaf Device in Children with Cerebral Palsy
},
journal = {European Journal of Clinical and Biomedical Sciences},
volume = {11},
number = {3},
pages = {43-47},
doi = {10.11648/j.ejcbs.20251103.12},
url = {https://doi.org/10.11648/j.ejcbs.20251103.12},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ejcbs.20251103.12},
abstract = {Cerebral palsy (CP) is a group of non-progressive diseases that occur during pregnancy, intranatal, and postnatal periods and are manifested by varying degrees of nervous system disorders. The frequency of CP incidence, according to various authors, ranges from 1.4 to 4 per 1000 normal births. Patients with CP require constant, long-term treatment and rehabilitation. Patients and methods: This study was conducted to determine the efficiency of a new method of locomotor therapy using the reduced gravity Krisaf device. The study group included 11 children of GMFCS I-III, the average age was 10.81 ± 3.54 years (6-16 years), (4 males, 7 females). The average number of procedures per course was 8.71 ± 1.25 (7-10). The average duration of the procedure was 36.11 ± 6.97 (20-40) minutes. The assessment was conducted before and after the course of therapy using the Krisaf device. Spasticity was assessed using the Modified Tardieu Scale (MTS). The Edinburgh Visual Gait Score (EVGS) was used to assess gait. The Physiological Cost Index (PCI) and the ability to maintain balance on one leg (One-leg standing balance test (OLST)) were also assessed. Results: Krisaf therapy is efficient while treating motor function and affects gait according to the EVGS (p = 0.02154, p < 0.05) and changes in energy efficiency according to PCI (p = 0.0293, p < 0.05) and has not significantly affected spasticity measured by the MTS in this study. On the right p = 0.5896, on the left p = 0.1056. The results of maintaining balance according to the OLST were ambiguous. On the right leg, the time changed reliably (p = 0.01403), and on the left leg, the time changed insignificantly (p = 0.4098). Conclusion: The obtained results showed the influence of therapy using the Krisaf device on changing the gait and energy efficiency of movement.},
year = {2025}
}
TY - JOUR T1 - Efficiency of Locomotor Therapy Using the Reduced Gravity Krisaf Device in Children with Cerebral Palsy AU - Zmanovskaya Vera Anatolyevna Y1 - 2025/07/22 PY - 2025 N1 - https://doi.org/10.11648/j.ejcbs.20251103.12 DO - 10.11648/j.ejcbs.20251103.12 T2 - European Journal of Clinical and Biomedical Sciences JF - European Journal of Clinical and Biomedical Sciences JO - European Journal of Clinical and Biomedical Sciences SP - 43 EP - 47 PB - Science Publishing Group SN - 2575-5005 UR - https://doi.org/10.11648/j.ejcbs.20251103.12 AB - Cerebral palsy (CP) is a group of non-progressive diseases that occur during pregnancy, intranatal, and postnatal periods and are manifested by varying degrees of nervous system disorders. The frequency of CP incidence, according to various authors, ranges from 1.4 to 4 per 1000 normal births. Patients with CP require constant, long-term treatment and rehabilitation. Patients and methods: This study was conducted to determine the efficiency of a new method of locomotor therapy using the reduced gravity Krisaf device. The study group included 11 children of GMFCS I-III, the average age was 10.81 ± 3.54 years (6-16 years), (4 males, 7 females). The average number of procedures per course was 8.71 ± 1.25 (7-10). The average duration of the procedure was 36.11 ± 6.97 (20-40) minutes. The assessment was conducted before and after the course of therapy using the Krisaf device. Spasticity was assessed using the Modified Tardieu Scale (MTS). The Edinburgh Visual Gait Score (EVGS) was used to assess gait. The Physiological Cost Index (PCI) and the ability to maintain balance on one leg (One-leg standing balance test (OLST)) were also assessed. Results: Krisaf therapy is efficient while treating motor function and affects gait according to the EVGS (p = 0.02154, p < 0.05) and changes in energy efficiency according to PCI (p = 0.0293, p < 0.05) and has not significantly affected spasticity measured by the MTS in this study. On the right p = 0.5896, on the left p = 0.1056. The results of maintaining balance according to the OLST were ambiguous. On the right leg, the time changed reliably (p = 0.01403), and on the left leg, the time changed insignificantly (p = 0.4098). Conclusion: The obtained results showed the influence of therapy using the Krisaf device on changing the gait and energy efficiency of movement. VL - 11 IS - 3 ER -
Children’s Treatment and Rehabilitation Center “Nadezhda”, Tyumen, Russia
Biography: Zmanovskaya Vera Anatolyevna is the head of a regional clinic specializing in the rehabilitation of children with central nervous system disorders and musculoskeletal conditions, as well as an associate professor at Tyumen State University. In 2012, she com-pleted her postgraduate studies and defended her candidate’s dis-sertation. She is recognized for her exceptional contributions to the study of cerebral palsy and related motor system disorders. In recent years, she has participated in numerous research studies on the therapy of children with cerebral palsy. Currently, she is a member of the Expert Council on Cerebral Palsy and Related Movement Disorders and a speaker at national and international conferences.
Research Fields: Management of spasticity in children with cerebral palsy; organization of assistance to children with spinal muscular atrophy; treatment of children with short bowel syndrome; assistance to children after multilevel skeletal surgeries; organization of observation of children with cerebral palsy.

Information